1. Recognition and Control Techniques for Enhancing Autonomous Driving
1. Automotive sensing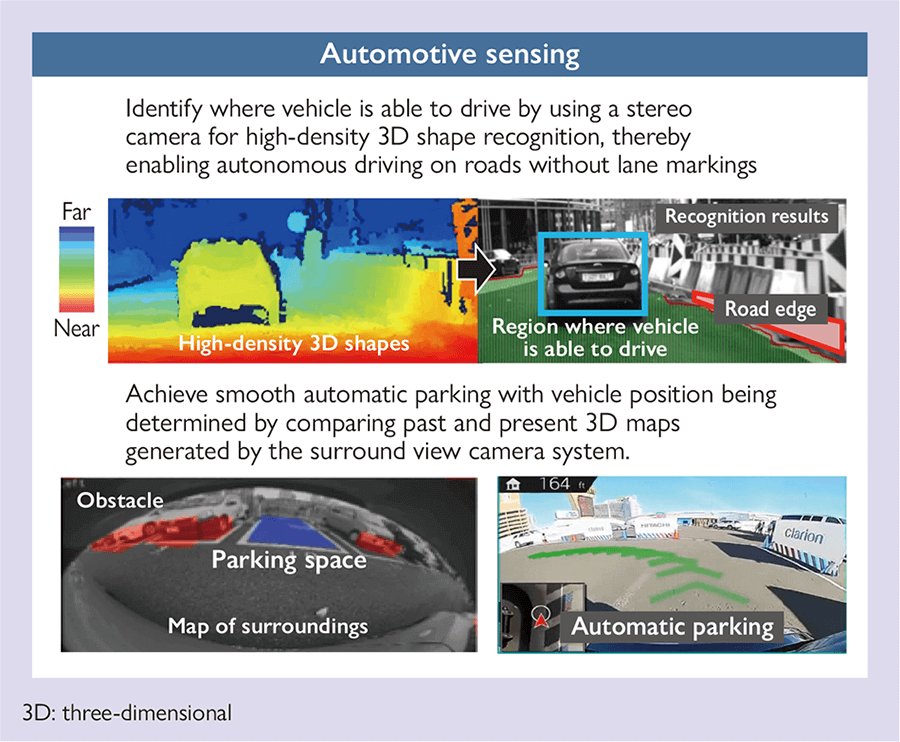
The market is seeing an acceleration in the development of automotive sensing technology aimed at realizing autonomous driving. Hitachi is also developing vehicle-mounted sensors that include stereo cameras and surround view cameras (peripheral cameras installed on the left, right, front, and rear for viewing the area around the vehicle). Autonomous driving has already advanced as far as automatic steering functions for lane-keeping on highways, and it is anticipated that the scope of application will expand beyond highways to include ordinary roads in the future. This means that a key challenge for sensors will be the ability to identify not only specific features such as lanes and other vehicles but also things like generic objects on ordinary roads or complex road layouts such as those at intersections.
To implement automatic steering on ordinary roads, Hitachi has developed a stereo camera that uses a high-density three-dimensional (3D) point cloud to determine where the vehicle is able to drive and identify the shapes of arbitrary obstacles on the road. Similarly, to enable automatic parking with smooth vehicle steering, Hitachi has also developed a surround view camera system able to view the surroundings of the vehicle using fish-eye cameras, and that can determine vehicle position by comparing past and present 3D maps generated by these cameras.
In the future, Hitachi intends to use this technology to contribute to implementing practical autonomous driving that can be used on a wide variety of roads.