
[ⅱ]安全・安心を提供する自動運転技術・電動化自動運転/先進運転支援システムの進化を支えるセンシング技術
執筆者
村松 彰二Muramatsu Shoji
- 日立Astemo株式会社 技術開発統括本部 次世代モビリティ開発本部 自動運転技術開発部 所属
志磨 健Shima Takeshi
- 日立Astemo株式会社 AD/ADASビジネスユニット センシングシステム設計部 所属
早川 仁Hayakawa Hitoshi
- 日立製作所 研究開発グループ デジタルPFイノベーションセンタ エッジインテリジェンス研究部 所属
岸本 真Kishimoto Tadashi
- 日立Astemo株式会社 技術開発統括本部 次世代モビリティ開発本部 E/Eアーキテクチャ開発部 所属
金井 雅之Kanai Masayuki
- 日立Astemo株式会社 技術開発統括本部 次世代モビリティ開発本部 自動運転技術開発部 所属
執筆者の詳細を見る
村松 彰二Muramatsu Shoji

- 日立Astemo株式会社 技術開発統括本部 次世代モビリティ開発本部 自動運転技術開発部 所属
- 現在,自動運転/先進運転支援システムの先行開発に従事
- 博士(工学)
- 自動車技術会会員
志磨 健Shima Takeshi
- 日立Astemo株式会社 AD/ADASビジネスユニット センシングシステム設計部 所属
- 現在,運転支援向けのセンシングシステム,ステレオカメラ,画像認識の開発に従事
早川 仁Hayakawa Hitoshi

- 日立製作所 研究開発グループ デジタルPFイノベーションセンタ エッジインテリジェンス研究部 所属
- 現在,車載情報処理システムの研究開発に従事
- 博士(工学)
岸本 真Kishimoto Tadashi
- 日立Astemo株式会社 技術開発統括本部 次世代モビリティ開発本部 E/Eアーキテクチャ開発部 所属
- 現在,自動運転/先進運転支援システムの実装技術開発に従事
金井 雅之Kanai Masayuki

- 日立Astemo株式会社 技術開発統括本部 次世代モビリティ開発本部 自動運転技術開発部 所属
- 現在,自動運転/先進運転支援システムの先行開発に従事
ハイライト
日立グループは,1990年代より自動運転/先進運転支援システムの開発に車載機器中心で取り組んでいる。自動運転や運転支援の機能が進化するためには,走行環境を認識する外界センシングの技術開発が重要となる。
本稿では,日立が開発する複数のセンサー構成を示し,走行環境を三次元的に捉えることを特長とするステレオカメラ,マルチセンサーによるセンサーフュージョン機能,AI実装技術を紹介する。また,高度化するセンシングシステムを検証するためのシミュレーション検証技術に関して取り組みを述べる。
1. はじめに
走行環境を理解するためのセンサーや車両制御コントローラを車両に搭載し,高速道路をドライバーの操作なしに走行するハンズオフ機能や衝突回避機能などを実現する自動運転(AD:Autonomous Driving)/先進運転支援システム(ADAS:Advanced Driver Assistance Systems)の技術開発と実用化が加速している。さらなる安全・安心の実現に向けて,従来センサーでは困難な落下物や急な割り込み車両の検知など,センシング機能の向上に対するニーズが高まっている。また,自動運転機能の適用範囲拡大に伴い,さまざまな走行環境下で安定したセンシングを可能とするため,複数のセンサーを組み合わせるマルチセンサー構成が今後の主流になる。
本稿では,運転支援システムの基本構成から今後の全周囲センシングの構成を述べ,多様なユースケースに対応するためのセンシング技術開発として,ステレオカメラ,センサーフュージョン,AI(Artificial Intelligence),および高度化するセンシング機能のシミュレーション検証に関する取り組みを紹介する。
2. AD/ADASのセンシングシステム構成
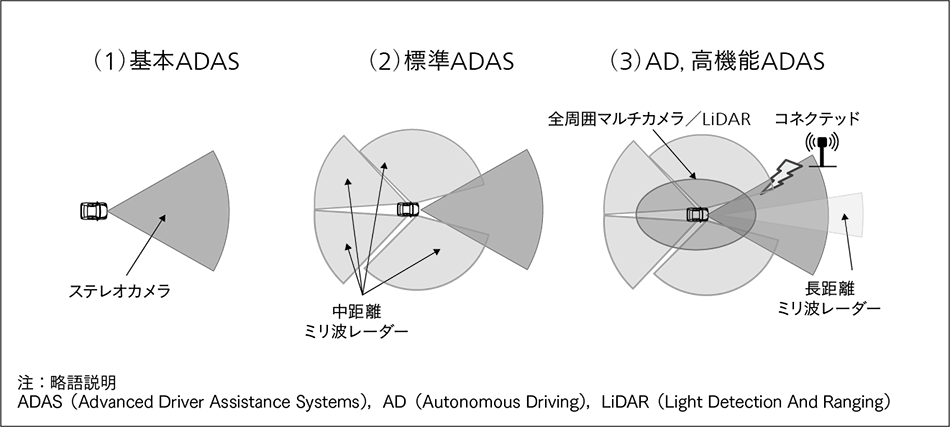
自動車の外界センシングシステムは,センサーデバイスやマイコン技術の進化と,運転支援向けの安全機能を規格化したアセスメント,運転者の負担軽減を実現する自動運転のニーズの流れの中で高度化してきた。日立が開発する外界センシングシステムの構成を図1に示す。同図(1)に示す衝突被害軽減ブレーキなどの機能を有する基本ADASは,車両の前方を広範囲に立体視できる1台のステレオカメラにより,廉価に車両前方センシングを実現することを特長とする。車両の後側方の安全も支援する機能を加えた同図(2)の標準ADASでは,ステレオカメラに加えて複数の中距離ミリ波レーダーで自車の全周囲をセンシングする。同図(3)のADや高機能ADASにおいては,遠方を検知する長距離ミリ波レーダーと全周囲をセンシングする複数カメラやLiDAR(Light Detection And Ranging)を追加し,より高度なセンシング機能を果たすことができる。これら複数センサーを用いたセンシングシステムでは,搭載された複数センサーの結果を統合するセンサーフュージョン機能により,各センサーが苦手とするシーンを相互に補完する冗長構成とすることで,高信頼な外界センシングを実現している。次章で,日立のセンシングシステムの特長を述べる。
図1|日立が考える外界センシング構成のラインアップ 基本ADASはステレオカメラで実現する。さらにカメラやレーダーを追加することで,多機能化と信頼性向上を実現する。
3. 高信頼・高機能を実現するセンシング技術
本章では,前述のセンサー構成の中で,フロントセンシングとしてステレオカメラ,複数のカメラやレーダーを活用したセンサーフュージョン技術,複雑な走行環境下で高度な認識・判断を行うAIの実装技術に関して紹介する。
3.1 ステレオカメラを用いた三次元センシング
- ステレオカメラの概要
日立は,二つのカメラで三次元情報と画像情報を同時に取得するステレオカメラを2008年より運転支援向け外界検知センサーとして実用化している。ステレオカメラは人間の目と同じように,左右二つのカメラの見え方のずれ(視差)から対象物までの距離を算出することができる(図2参照)。画像の一点一点で視差(距離)を算出することで三次元情報となる視差画像(距離画像)を生成し,この三次元情報の中からある大きさの塊を立体物として検出するステレオカメラは,立体物を検出した後に,検出した物体が何であるかを画像処理で識別する特徴を持つ。現在,交差点右左折時の飛び出し歩行者が検知可能な広範囲な検出範囲と,先行車追従機能に必要な遠方車両検出をオールインワンで実現する次世代ステレオカメラを開発中である1)。 - ステレオカメラのメリット
日立のステレオカメラの特長は,立体視とAIベースの物体識別処理の併用により,低処理負荷で環境変化に強いセンシングを実現している点である。立体視については,二つのカメラで測距することによって対象を三次元的に捉えており,未知の形状や未知の模様の物体でも検出でき,物体全体が見えていなくても検出と測距ができる。この立体視の特長を活用すると,例えば図2の(1)のように,道路上に寝ている人などあらかじめ形状が想定できない障害物であっても,単眼カメラで必要とされている事前学習といった過程を経ずに検出可能である。また別の例としては図2の(2)のように,自車の前方に割り込んで来る車両の全体が見えない状況でも,車両の形状と距離を把握することが可能である。これらの日立のステレオカメラの特長により,複雑な走行環境下でも安定したセンシング機能を実現できる。
図2|ステレオカメラの計測原理 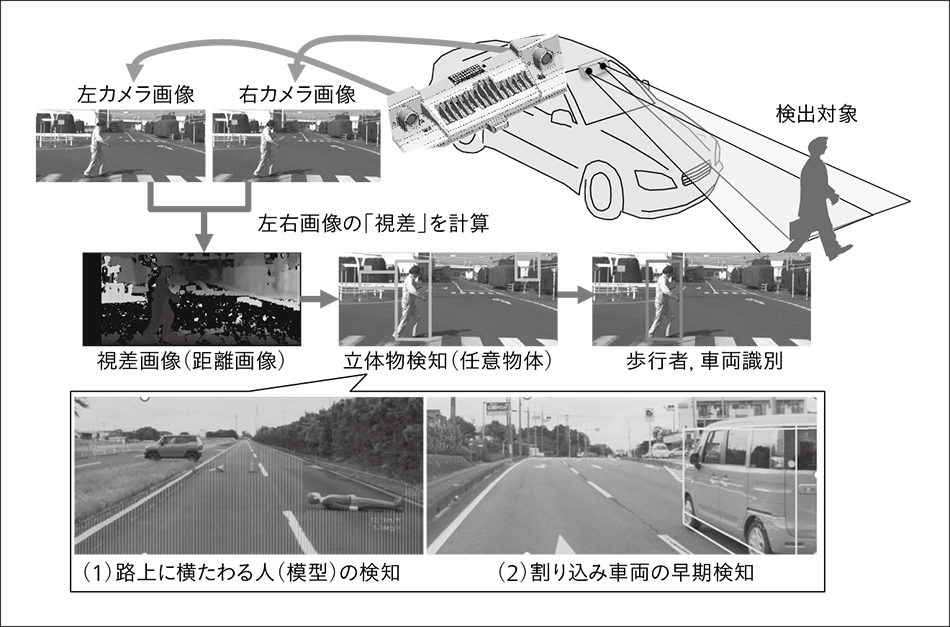 左右の二つのカメラの見え方のずれ(視差)から視差画像を生成し,視差画像から任意形状の立体物(1),(2)を検知する。
左右の二つのカメラの見え方のずれ(視差)から視差画像を生成し,視差画像から任意形状の立体物(1),(2)を検知する。
3.2 マルチセンサーフュージョン
運転判断に必要な自車周辺の状況を正確に認識するため,日立はカメラやレーダーなどの複数センサーによる検知結果を統合するマルチセンサーフュージョン機能を開発している(図3参照)。
マルチセンサーフュージョン機能により複数センサーで補い合って周辺状況を認識することで,逆光などの一部のセンサーが苦手とするシーンやセンサー故障などの困難な状況でも高信頼な運転判断が可能となる。この機能は,各センサーの検知情報の違いを吸収して共通化するセンサーアダプタ,車両や歩行者などの立体物を対象とする物標フュージョン,白線や路端などの道路を対象とする車線フュージョン,そして,センサー検知による認識結果と地図情報を合成する地図フュージョンで構成される。特長は,センサーの検知誤差モデルを用いて,各センサーが得意とする検知結果を採用・合成してセンサー単体検知より精度を高める「検知最適合成」と,センサーで検知した白線や路端の位置関係から推定した車線およびそれらの接続関係として道路構造を抽出し,センサー情報から地図相当の情報を再構築する「センシング地図」である。検知最適合成により,センサーを追加することでより高信頼にかつ正確に立体物の位置や速度を得られるようになり,また,センシング地図により地図情報に含まれない道路工事などの突発状況にも対応でき,自動運転や運転支援を継続して安全な運転に寄与する。
図3|マルチセンサーフュージョン機能 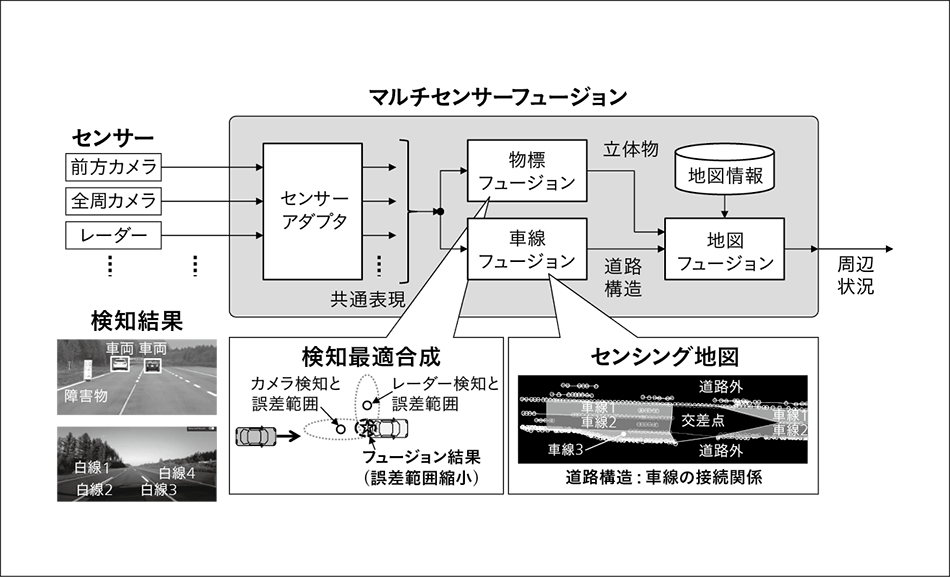 各センサーの立体物や白線などの検知結果を用いて,立体物を物標フュージョンで,白線などの車線情報を車線フュージョンで統合し,これら統合結果と地図情報を地図フュージョンにて融合して,高信頼に精度よく自車周辺状況を出力する。物標フュージョンでは,検知最適合成技術により,各センサーの得意な部分を生かして誤差を縮小し,検知精度を高める。車線フュージョンでは,センシング地図技術により車線の接続関係や境界といった道路構造を抽出し,地図に反映されない工事などの突発状況に対応する。
各センサーの立体物や白線などの検知結果を用いて,立体物を物標フュージョンで,白線などの車線情報を車線フュージョンで統合し,これら統合結果と地図情報を地図フュージョンにて融合して,高信頼に精度よく自車周辺状況を出力する。物標フュージョンでは,検知最適合成技術により,各センサーの得意な部分を生かして誤差を縮小し,検知精度を高める。車線フュージョンでは,センシング地図技術により車線の接続関係や境界といった道路構造を抽出し,地図に反映されない工事などの突発状況に対応する。
3.3 AI機能の車載実装
- AIによるセンシング技術の高度化
カメラやLiDARで撮影したセンシングデータから物体や走行領域を検出する際,従来は検出対象の特徴をルールとして定義していた。しかし,すべての状況のルール定義は困難であり,複雑な走行環境に対応するにはAI技術の活用が期待されている。AIでは教師データを学習することで,開発者によるルール定義を不要とし,より多様な物体や複雑な走行環境であっても検出可能となるため,センシング機能の高度化に向けた要素技術として注目されている。一方でAIは,演算量が多く車載機器に使用されるデバイス上でのリアルタイム処理は一般的に困難とされる。そこで日立では,車載デバイスに搭載可能な程度にAIの演算量を削減する技術に取り組んでいる。 - AI縮約実装技術
AIの演算では,入力されるデータに対して,複数の層を介してデータの特徴量を抽出し,最後に物体や走行領域などの検出結果が出力される構成となっている(図4参照)。各層は複数のノードで構成されており,一つひとつのノードが入力データ中の特定の特徴に反応し,特徴量を計算する演算単位となる。
AIの演算量を削減するには上記のノード数を減らす必要があるが,単にノードを削除するだけでは認識性能が大きく低下してしまう。そのため,各ノードが認識精度へ与える影響度(感度)をあらかじめ解析し,これを層単位で集約して,層単位での影響度(感度)を算出する。これにより認識精度への影響度が低い層では多くのノードを削減し,認識精度への影響度が高い層ではノードをあまり削減しないように調整することで,認識精度を低下させずに演算量の削減が可能となる。日立が開発した感度解析技術,縮約率決定技術2)を用いた一例として,縮約前と比較し,1.6%の精度劣化でAIの演算量を88%削減することが可能となると確認した。
図4|AI縮約実装技術の概要 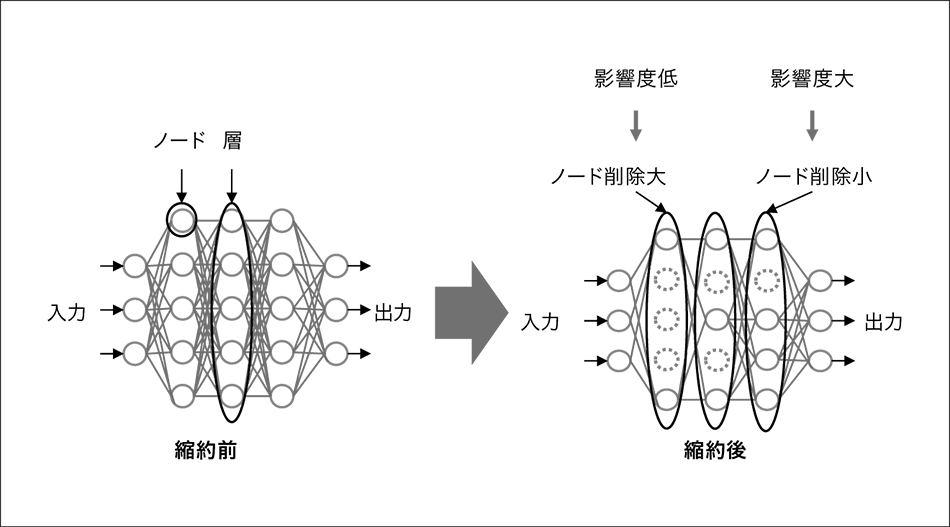 縮約前に各ノードの認識精度への影響度を解析し,層単位で集約する。影響度が低い層はノードの削除割合を大きく,影響度が高い層はノード削除割合を小さく設定して縮約を行う。
縮約前に各ノードの認識精度への影響度を解析し,層単位で集約する。影響度が低い層はノードの削除割合を大きく,影響度が高い層はノード削除割合を小さく設定して縮約を行う。
4. 高度化するセンシング機能の検証技術
センシング機能の高度化に伴って機能検証の項目が著しく増加しており,実車を用いた試験だけでは限界がある。さらに,車両周辺の認識を行うカメラにおいては,天候を含むさまざまな交通環境下で動作する必要があり,その環境を再現して機能検証することが求められている。日立は,センシング機能検証において,実車を使用することなく走行環境をシミュレーション上で再現する取り組みを強化しており,ステレオカメラの開発環境として高精細CG(Computer Graphics)映像を用いたHILS(Hardware in the Loop Simulation)システムを構築している(図5参照)。
図5|高精度カメラHILSシステムの構成 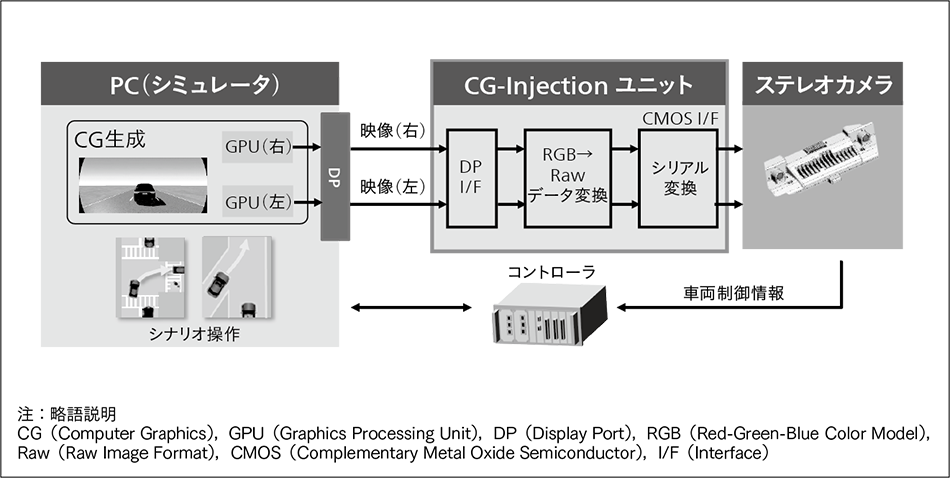 シミュレータで生成された左右の映像をカメラに入力することで,実車では困難なシーンを評価する。
シミュレータで生成された左右の映像をカメラに入力することで,実車では困難なシーンを評価する。
構築したHILSでは,高精細化などのイメージセンサーの性能向上に対応するため,コンピュータで高精細な映像を作成している。その高精細映像をイメージセンサーから得られる画像データとして模擬するために,画像処理を行いステレオカメラ内のメモリにリアルタイムに転送するCG-Injectionユニットを開発した。開発したHILS環境により,さまざまな交通環境をシミュレーションして,カメラによるセンシング機能検証を可能としている。
機能検証では,カメラによるセンシングが難しい雨・逆光などの評価をシミュレーション上で行うことが重要である。そのためには,現実世界により近いリアルなCG再現が求められる。日立は,内閣府「戦略的イノベーション創造プログラム(SIP)第2期/自動運転(システムとサービスの拡張)」の「仮想空間での自動走行評価環境整備手法の開発」3)に参画して,シミュレーション技術の開発を行っている。
本プログラムでは,センサー検出原理に基づき物理現象をバーチャルモデル化し,イメージセンサー内部はさらに精緻に再現したシミュレーションモデルを開発することにより,現実世界との一致性の高いシミュレーション環境を構築し,カメラの機能検証への適用を進めている(図6参照)。
これら開発したシミュレーション環境により,認識が難しいシーンや危険シーンの評価が可能となり,今まで実車に頼っていた試験を削減させることができ,センシング機能の高度化に貢献する。
図6|物理現象に基づく仮想モデル化 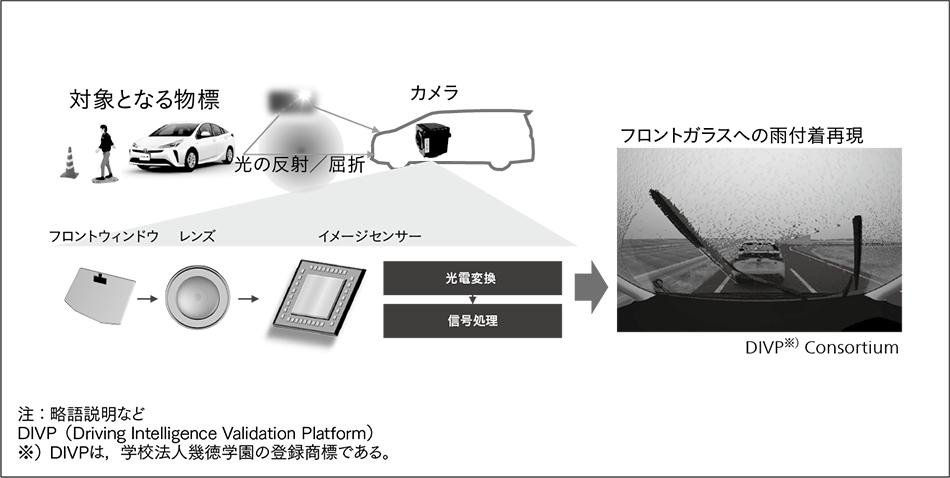 現実世界と一致性の高いシミュレーションモデルを開発し,雨などの認識不調に起因する限界性能を評価する。
現実世界と一致性の高いシミュレーションモデルを開発し,雨などの認識不調に起因する限界性能を評価する。
5. おわりに
本稿では,さらなる進化が期待されているAD/ADASにおけるセンシング技術に関する取り組みを述べた。日立は,今後ともステレオカメラやミリ波レーダーなど複数のセンサーを統合・融合し,高度なセンシング機能を開発することで事故削減や利便性向上に寄与し,安全・安心なクルマ社会に貢献していく。
参考文献など
- 1)
- 照井孝一,外:安全・安心とともにQoL向上を提供するセンシング・車両制御技術,日立評論,102,5,610~615(2020.9)
- 2)
- D. Murata et al.: Automatic CNN Compression System for Autonomous Driving, 2019 18th IEEE International Conference On Machine Learning And Applications (ICMLA), pp. 838-843 (2019.12)
- 3)
- 戦略的イノベーション創造プログラム(SIP)第2期/自動運転(システムとサービスの拡張) 仮想空間での自動走行評価環境整備手法の開発,令和元年度 報告書(PDF, 16.1MB)



