
[ⅱ]安全・安心を提供する自動運転技術・電動化シャシーサブシステムの電子制御技術
執筆者
根津 隆Nezu Takashi
- 日立Astemo株式会社 技術開発統括本部 次世代シャシー開発本部 シャシー機構開発部 所属
井上 幸彦Inoue Yukihiko
- 日立Astemo株式会社 技術開発統括本部 次世代シャシー開発本部 シャシー機構開発部 所属
臼井 拓也Usui Takuya
- 日立Astemo株式会社 技術開発統括本部 次世代シャシー開発本部 シャシー機構開発部 所属
執筆者の詳細を見る
根津 隆Nezu Takashi

- 日立Astemo株式会社 技術開発統括本部 次世代シャシー開発本部 シャシー機構開発部 所属
- 現在,サスペンションを中心にシャシー系システムの開発に従事
- 自動車技術会会員
井上 幸彦Inoue Yukihiko

- 日立Astemo株式会社 技術開発統括本部 次世代シャシー開発本部 シャシー機構開発部 所属
- 現在,ステアバイワイヤシステムの開発に従事
臼井 拓也Usui Takuya

- 日立Astemo株式会社 技術開発統括本部 次世代シャシー開発本部 シャシー機構開発部 所属
- 現在,電動ブレーキシステムの開発に従事
- 自動車技術会会員
ハイライト
自動運転時代の安全,安心,快適性の向上をめざして三つのシャシーサブシステムの電子制御技術を開発している。
ステアリングでは,リンクレスステアバイワイヤによる安全性とレイアウト自由度の向上,および高応答を生かした高い緊急回避性能や外乱安定性を特長としており,さらにハンドルに置き換わる次世代の入力システムも開発中である。ブレーキでは,ブレーキバイワイヤによる応答性と制御精度の高さで車両の安全性と電費向上が期待でき,配管を含む油圧機器のない車両搭載性に優れた電動機械方式のスマートブレーキを開発中である。サスペンションでは,フル電動方式(Electric Active Suspension)による高い応答性を実現する圧倒的な快適性を特長とし,振動エネルギーの回生も視野に入れて開発中である。
これらのシステムで,新たなモビリティ社会の構築に貢献していく。
1. はじめに
自動運転時代のPOV(Personally Owned Vehicle)やMaaS(Mobility as a Service)では,安全・安心とともに乗員がセカンドタスクをストレスなく実行できる,快適な移動空間の実現が求められる。車両の頭脳である上位コントローラの指令に応じた車両運動を実現するため,ステアリングやブレーキ,サスペンションといったシャシーサブシステムを統合制御する。それぞれのタイヤのコーナリングフォースや,制駆動力,それを増減させる上下反力を高精度かつ高応答で制御することで高い安全性を担保するとともに,乗員にとって不快な揺れや振動を抑制できるシステムが必要である。
本稿では,この新たな価値実現のために,日立Astemo株式会社で取り組む三つの革新的なシャシー電子制御サブシステムについて紹介する。
2. ステアリングシステム(ステアバイワイヤ)
近年のCASE(Connected, Autonomous, Services & Shared, Electric)の加速とともに先進運転支援システム(ADAS:Advanced Driver Assistance Systems)の普及と自動運転(AD:Autonomous Driving)の実用化が急速に拡大しつつある。こうした中でステアリングシステムに求められるものは,ADAS/ADとの親和性と手動運転時の快適・利便性の両立である。さらにキャビンの設計自由度向上のためには,キャビンとシャシー間に機械的な接続を持たないステアリングシステムが望ましい。これらのニーズを満足し,安全技術の進化・拡大に貢献するため,リンクレスステアバイワイヤシステムの開発に取り組んでいる。
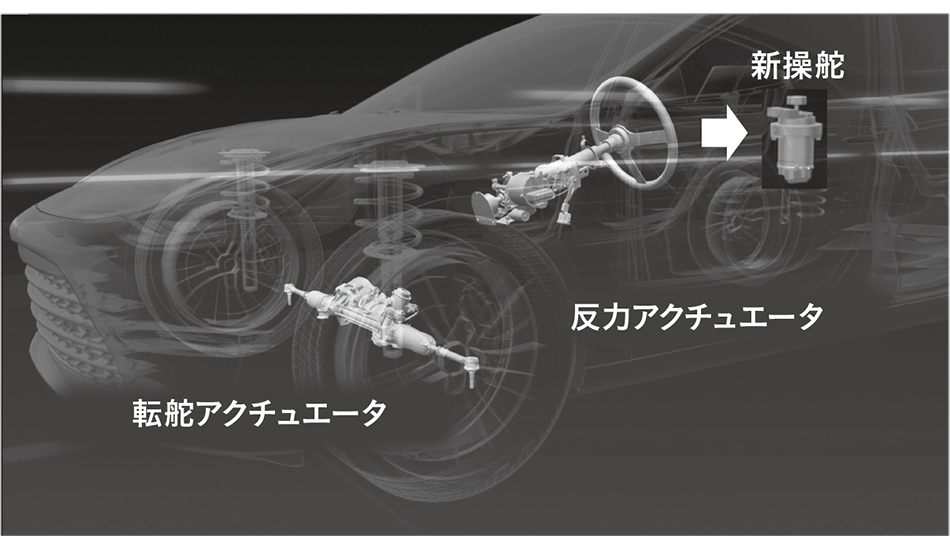
システム構成・機能概要を図1および図2に示す。
リンクレスステアバイワイヤを実現するため,電源,センサー,通信,駆動回路を完全2系統化した冗長構成とし,システムに故障が発生しても継続動作可能な高信頼設計とした。
ハンドル操作のギア比(操舵角と転舵角の比)を走行場面に応じて任意に設定可能で,快適利便性を向上する。ドライバーが安全に運転するために必要な情報をハンドル反力として伝達するとともに,不要な路面振動を遮断することで,ドライバーの疲労軽減を図りながら安全・安心な運転を実現する。また,急な横風などによる車両挙動の悪化をシステムが自動的に修正し,またタイヤ転舵や車両ヨーレイトの高応答化により,緊急回避性能を向上する。
さらにハンドルに代わる新操舵システムへの拡張機能を持ち,廉価で,高齢者などに向けて少ない負荷での操作,室内空間の拡大にも貢献できるシステムである。
図1|リンクレスステアバイワイヤと新操舵システムへの拡張 反力アクチュエータと転舵アクチュエータからなり,反力アクチュエータはハンドルに代わる新操舵システムへの拡張機能を有する。
図2|リンクレスステアバイワイヤのシステム構成・機能概要 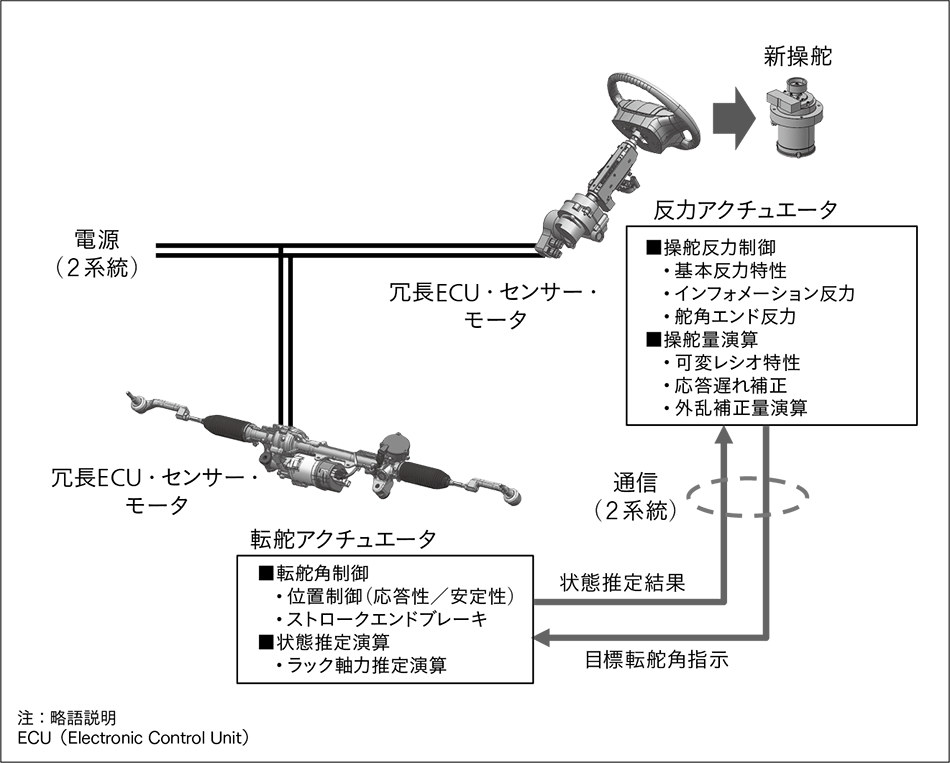 ドライバーや自動運転システムの要求を受けて,高応答・高精度な転舵アクチュエータ制御を実現する。
ドライバーや自動運転システムの要求を受けて,高応答・高精度な転舵アクチュエータ制御を実現する。
3. ブレーキシステム(ブレーキバイワイヤ)
安全性・快適性および環境性能の向上をめざしてブレーキシステムの電動化を進めている。
これまでに,横滑り防止装置,電動アクチュエーション,電動パーキングブレーキを製品化してきた。今後急速な拡大が予想される電動パワートレインや自動運転の要求に応えるため,ブレーキシステムにはこれまで以上に高い信頼性と応答性,制御性能が不可欠になる。一方,運転する楽しみを求めるドライバーのニーズにもより良いブレーキフィールを提供するため,車両側の制御とドライバーの操作を両立させることが可能なブレーキバイワイヤ(BBW:Brake by Wire)システムの開発を進めている。
既存のBBWシステムは電動モータとポンプにより発生した液圧を利用する電動液圧方式(EHB : Electro-hydraulic Brake)であるが,応答性,制御性能を考慮すると直接電動モータで制動力を制御する電動機械方式(EMB:Electro-mechanical Brake,社内名称:Smart Brake)が最適である。
スマートブレーキシステムの構成を図3に示す。
従来の液圧式キャリパの代わりに,各輪にスマートブレーキアクチュエータを配置し,液圧配管ではなくハーネスによって中央のコントローラに接続される。ドライバーの制動要求をペダルシミュレータなどにより検知し,中央のコントローラにより車両の状態も加味して各輪の制動力を演算し,各輪のアクチュエータに指令を送ることで,制動力を制御する。通常のサービスブレーキ,横滑り防止などの車両挙動制御,駐車ブレーキ機能に加え,高応答・高精度なアクチュエータ特性および各輪独立の制動力制御を生かし,車両の安全性や快適性の向上,ならびに回生協調ブレーキ性能の向上による車両の航続距離拡大などが実現できる。また,電源・信号系および各コントローラを冗長化することで,一次失陥時にも各種機能の継続が可能であり,システムの高い信頼性を確保できる。さらに,従来のブレーキ液圧配管がなくなることによる車両の組立性向上やレイアウトの自由度など,将来の電動パワートレインおよび自動運転車両に適したブレーキシステムである。
図3|スマートブレーキシステムの構成 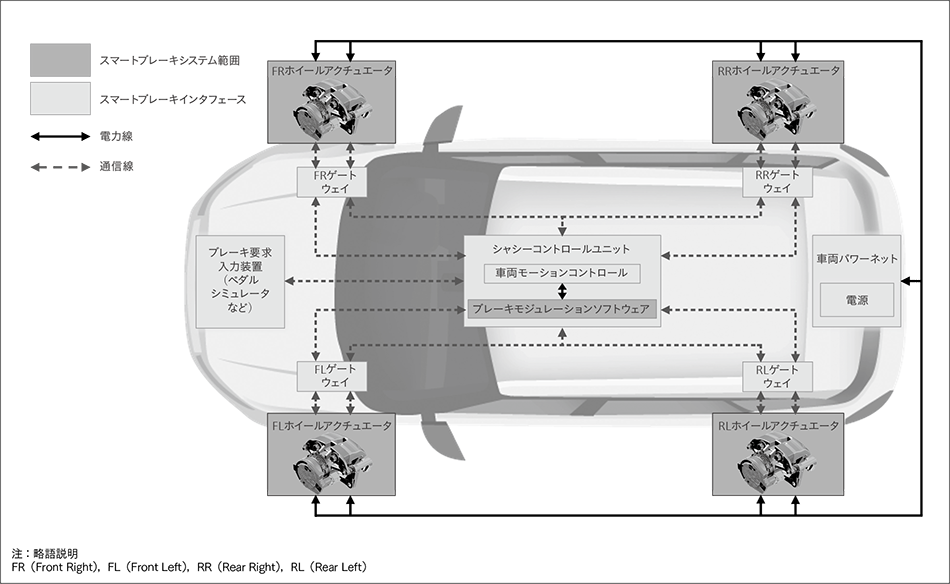 各輪にスマートブレーキアクチュエータを配置し,液圧配管ではなくハーネスによって中央のコントローラに接続する。ドライバーや自動運転システムの要求を受けて,各輪独立の高応答・高精度な制動力制御を実現する。
各輪にスマートブレーキアクチュエータを配置し,液圧配管ではなくハーネスによって中央のコントローラに接続する。ドライバーや自動運転システムの要求を受けて,各輪独立の高応答・高精度な制動力制御を実現する。
4. サスペンションシステム(電磁アクティブサスペンション)
図4|電磁アクティブサスペンション 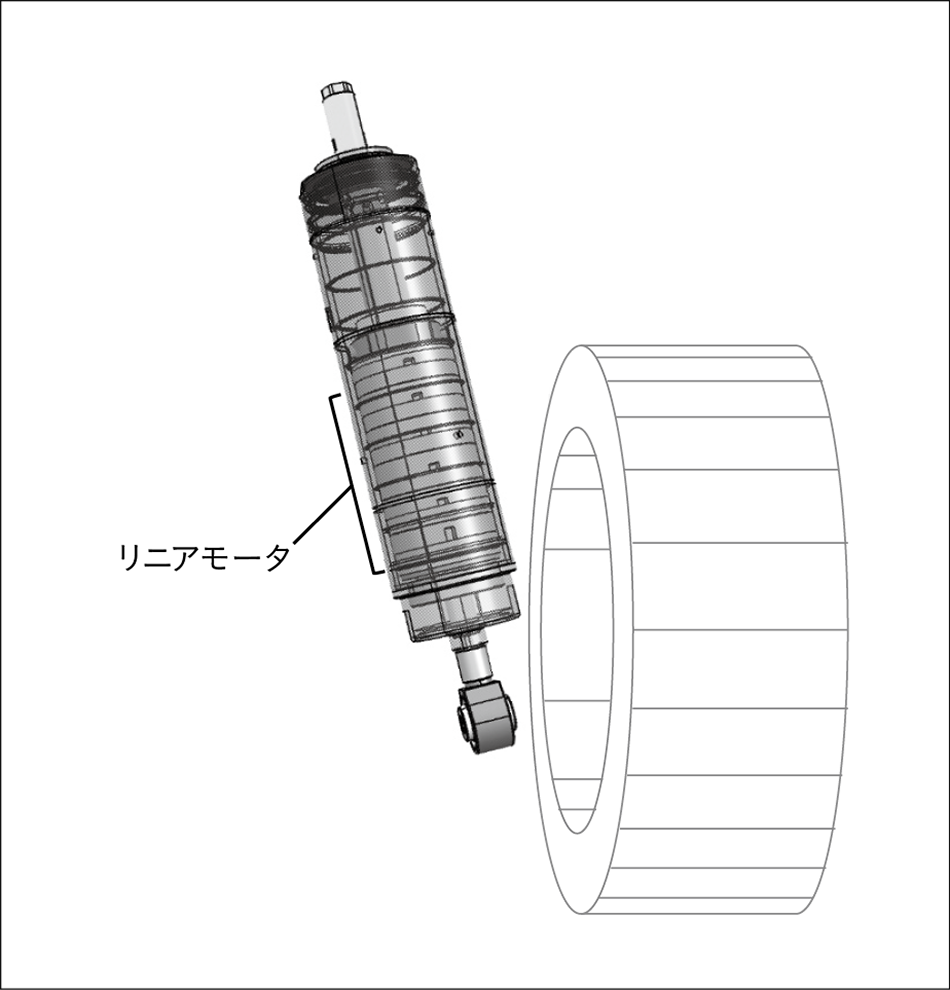 永久磁石式円筒リニアモータを内蔵した電磁アクティブサスペンションを示す。モータの発生させる電磁力がダイレクトに推力に変換されるため,高周波域まで制御が可能である。
永久磁石式円筒リニアモータを内蔵した電磁アクティブサスペンションを示す。モータの発生させる電磁力がダイレクトに推力に変換されるため,高周波域まで制御が可能である。
アクティブサスペンションは,路面の凹凸を積極的にいなしながら,ボディのロールやピッチなどの不快な揺れを大幅に低減可能であり,走行の安全を担保する高い運動性能とともに,車酔いや疲れを抑えた快適な移動空間を実現するシステムである。シャシー統合制御において,アクティブサスペンションは四つのタイヤの接地荷重を走行状態に応じて適切に配分することができるので,ステアリングやブレーキによる危険回避,停止性能を高め,車両運動性能と安全性の向上に寄与する。
従来のシステムは,ポンプやバルブ,配管などの多くの機器を搭載した油圧方式が主流であったが,フル電動化することにより,エネルギー消費の低減,オイルフリーによる対環境性,車両へのレイアウト性,搭載性,メンテナンス性を向上できる。
開発したリニアモータ方式の電磁アクティブサスペンションを図4に示す。
電磁力を発生するモータは,コイルと永久磁石からなるPM(Permanent Magnet)型誘導リニアモータで,ストロークセンサーの信号などに応じて相電流を制御することにより,所望の推力とストロークを発生可能である。
リニア方式の特徴は,モータの電磁力がメカ機構を介さずダイレクトにサスペンションに伝わることから,応答性や信頼性の面で利点があることである。これにより,路面からのショックやゴツゴツした高周波の振動まで低減することができるため,乗員がセカンドタスクを少ないストレスで実行でき,良好な路面を走行しているかのような快適な移動空間の実現が期待できる。さらに,システムの効率向上も視野に入れ,振動エネルギーを回生することもできる。
5. おわりに
図5|日立 In-wheel Motor Drive  高密度でモジュール化されたIn-wheel Motorを搭載する多目的EVプラットフォームを示す。
高密度でモジュール化されたIn-wheel Motorを搭載する多目的EVプラットフォームを示す。
自動運転時代のモビリティを支えるため,車両運動や乗り心地性能の進化にとどまらず,カーボンニュートラルなどの社会要請に広く応える開発を進めている。革新的な電子制御サブシステムの搭載を予定している日立グループが提案するEV(Electric Vehicle)プラットフォームを図5に示す。
本稿で紹介した三つの電動化技術は,シャシー性能の進化とともにクルマを設計,製造,利用する過程においても,環境負荷低減の効果が期待できる。本稿で述べたように,車両レイアウト自由度の向上,組み立てラインのコンパクト化,市場でのメンテナンス性向上など,持続可能な新たなモビリティ社会の実現への貢献をめざし,開発を推進していく。



